watonomous.github.io
[ Electrical Division : What is sensor-interfacing? ]
Created by [ Kushant Patel] on Feb 04, 2020
Sensor-Interfacing
The objective of sensor-interfacing group is to ensure the secure operation of all the sensors to their intended use while meeting all of software division's production requirements.
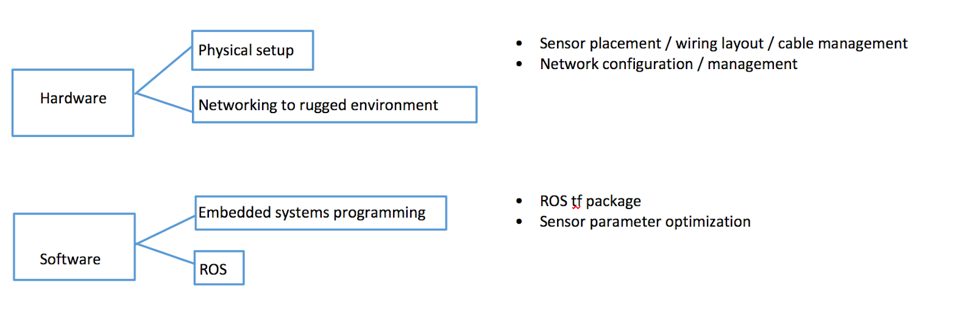
Each sensor on the vehicle (bolty) provides data which are used by different teams in software division to help WATonomous succeed in the auto-drive challenge. The secure operation of our sensors can be managed in two main layers: hardware and software. Below is an illustration of these layers and various projects that are involved within each layer.
\
[ {.confluence-embedded-image
height=”250”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
{.confluence-embedded-image
height=”250”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
\
Hardware
Hardware can be divided into two sub-layers: physical setup and networking to our car's central computer (rugged) environment.
- Physical setup
Members working on this sub-layer are responsible for placement of the sensors, wiring layout, and power management. These include specifying the location and position/orientation of the sensor, organizing the associated cables and securing their connection to the sensor and networking host. Power management is to secure there are no unforeseen power surges that may jeopardize the integrity of the sensor hardware. Some projects may involve collaboration with mechanical division and power-systems group within electrical division.
Preferred skills/experiences: electrical circuit diagram, power management, other hardware experiences
- Rugged networking
Members working in this sub-layer mainly deal with configuring the sensors to the existing rugged network interfaces and mainly securing the network connection all across sensors, rugged, and within the ROS environment as well. Additional work may involve bandwidth calculation and improving the integrity of our sensor network.
Preferred skills/experiences: Ubuntu environment, ROS environment, Network troubleshooting
Software
Software can be divided into two sub-layers: embedded systems programming and ROS.
- Embedded systems programming
Members in this sub-layer are required to edit existing sensor code to meet software team's production requirements. For example, if a camera’s focal length needs adjustment to a certain value, our members will be required to look through the camera codes and adjust the correct parameter to meet software division’s target. Software teams may not necessarily know the exact value they need to meet their requirements so sensor interfacing group may require to do trials to find that optimal value to give the best results. Additional work may include optimizing the existing codes to remove unnecessary lines, functions, and adding what becomes additionally required based on the new requirements for the competition.
Preferred skills/experience: C/Python programming, industry grade sensor programming/debugging
- ROS
ROS is the framework we use to make our car operate autonomously. The car's entire software stack revolves around ROS and each of the sensor data is provided to be used in the ROS environment. Depending on software division's production requirement, members working on this sub-layer are required to make the existing sensor ROS drivers to improve the accuracy and integrity of sensor data.
Preferred skills/experience: C/Python programming, ROS environment
Attachments:
![]() Picture1.png (image/png)\
Picture1.png (image/png)\
Document generated by Confluence on Nov 28, 2021 22:40