watonomous.github.io
[ Electrical Division : CAN Interface and Software Design Document ]
Created by [ Shane Ding], last modified by [ Avery Chiu] on May 02, 2021
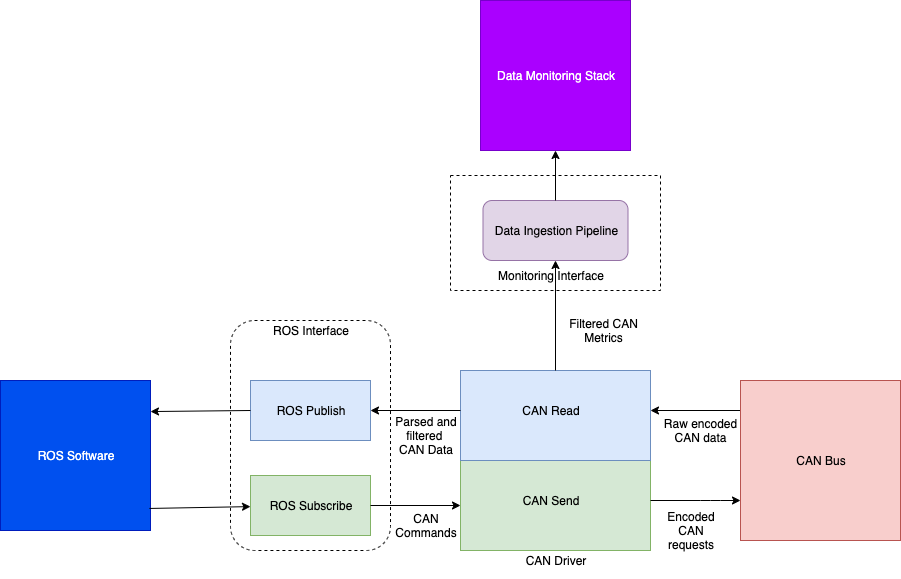
As the requirements for the car increase we need to create a more modular robust CAN pipeline in order to create a framework for the new features that are being created. The key requirements for the remodel are to be able to modularize the can driver from the ros interface, this will allow us to add multiple interfaces to listen to the CAN busses while maintaining clean and efficient code. This is important for Telemetry as we plan on logging, and displaying CAN information in real time and potentially streaming the cameras and decision making in real time as well to anyone with access to the telemetry system. In order to achieve this level of modularity the CAN pipeline will be rebuilt as shown below.
CAN Interface (pipeline overview):
[ {.confluence-embedded-image
height=”400”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
{.confluence-embedded-image
height=”400”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
\
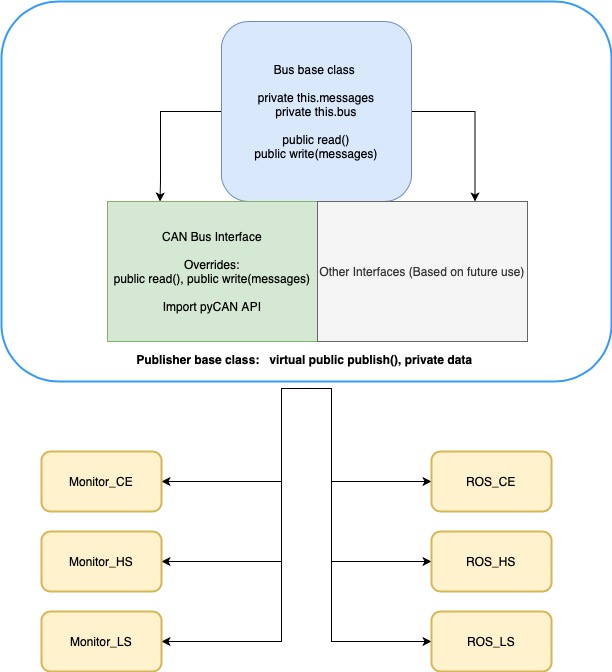
Class hierarchy and software design:
\
[ {.confluence-embedded-image
height=”400”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
{.confluence-embedded-image
height=”400”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
[ {.confluence-embedded-image
.confluence-external-resource
height=”400”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
{.confluence-embedded-image
.confluence-external-resource
height=”400”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
\
Design Decisions:
- Programming Language: Python
- Software is modularized to allow the addition of multiple modules (e.g. monitoring_CE, ROS_HS, etc.) as well as multiple bus protocols (CAN and more in the future).
Interacting with CAN Bus Interface
- As of now the Monitoring Interface and ROS Interface will be the ones interacting with the CAN Bus Interface
- The constructor for the interface takes two parameters:
- bus_id : A value ranging from [ 0,2 ] which corresponds to the bus that is being used (HS, CE, LS).
- message_names: A list of message names corresponding to messages in the DBC, these are the messages that will be used as filters
- read(message_name)
- message_name: The name of the message the user wants read in real time
- returns: A dictionary where the keys are the signals held in message_name, and the values are the value of each signal.
- write(message_name, message_data)
- message_name: The name of the message the user wants to write in real time
- message_data: The data that the user wants to send to CAN
- returns: None
\
Attachments:
![]() Watonomous
drawing (2).png (image/png)
Watonomous
drawing (2).png (image/png)
![]() Untitled
Diagram.jpg (image/jpeg)\
Untitled
Diagram.jpg (image/jpeg)\
{kind=link}
{kind=link}
Document generated by Confluence on Nov 28, 2021 22:40