watonomous.github.io
[ Electrical Division : Lidar Networking ]
Created by [ Rowan Dempster], last modified by [ Frank Yan] on Mar 10, 2020
The current LiDAR setup is designed to accommodate a growing number of different LiDARs. Each device has its own IPv4 address, port, frame id & namespace. The current setup is summarized in the table below. The left and right LiDARs are currently not in use.
[LiDAR] IPv4 Address Port Frame ID Namespace
Left Roof VLP16 169.254.0.101 2368 vlp1 vlp1
Right Roof VLP16 169.254.0.102 2369 vlp2 vlp2
Middle Roof VLP32 169.254.0.103 2370 vlp3_link vlp3
——————————————————————————— ——————- ———- ———— ———–
Note all IPs are in the range of 169.254.0.xxx, and all ports range up
from 2368. These were initially configured on the LiDARs via their web
portal, and are passed to each driver node instance of a respective
LiDAR. To v[erify a group of LiDARs are]{.inline-comment-marker
data-ref=”ea7372fc-9ae6-48e0-aabb-7142ed373432”} being read, follow the
steps below:
- Make sure you're on the right network. Cli[ck the WiFi icon on the top right and click on the sensor network, enp4s0f1]{.inline-comment-marker data-ref=”7a9d7db7-687d-475c-b28a-6d1138295e43”}. This will connect you to the network.
- To check what LiDARs are running, launch sudo wireshark and click on the enp4s0f1 network.
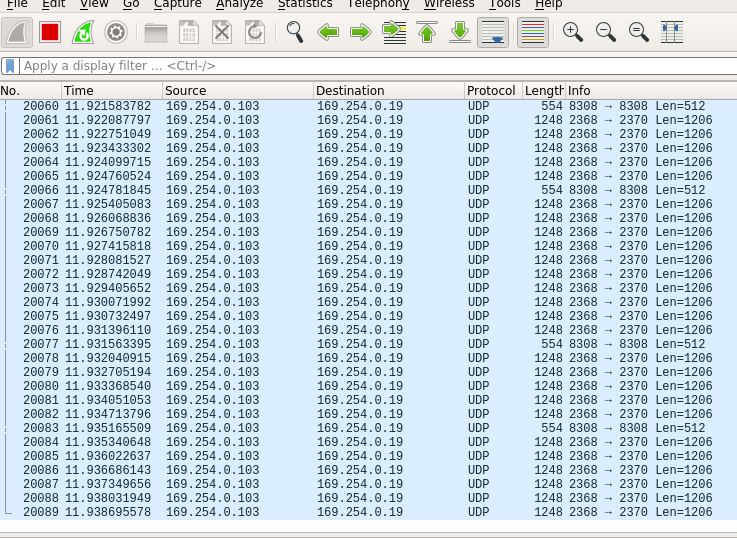
- Look for UDP packets, to do more filtering you can type in "net 169.254.0.103" as a capture filter to receive only the LiDAR's data.
- [If you are getting ARP packets, make sure the rugged is on and that the network configuration is correct.]{.inline-comment-marker data-ref=”2316d6dc-b283-42fc-b734-4d822c4a51dd”}
The following picture shows the output when running wireshark:
[ {.confluence-embedded-image
height=”400”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
{.confluence-embedded-image
height=”400”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
LiDAR UI
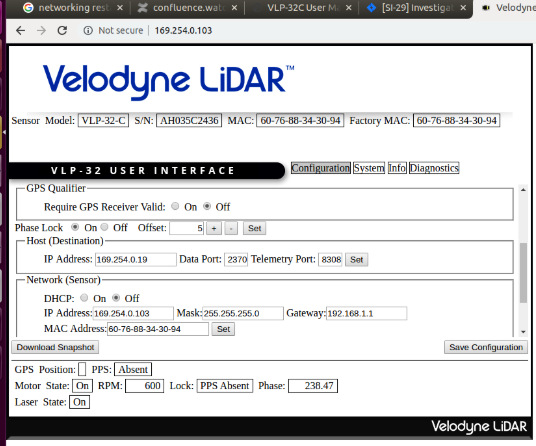
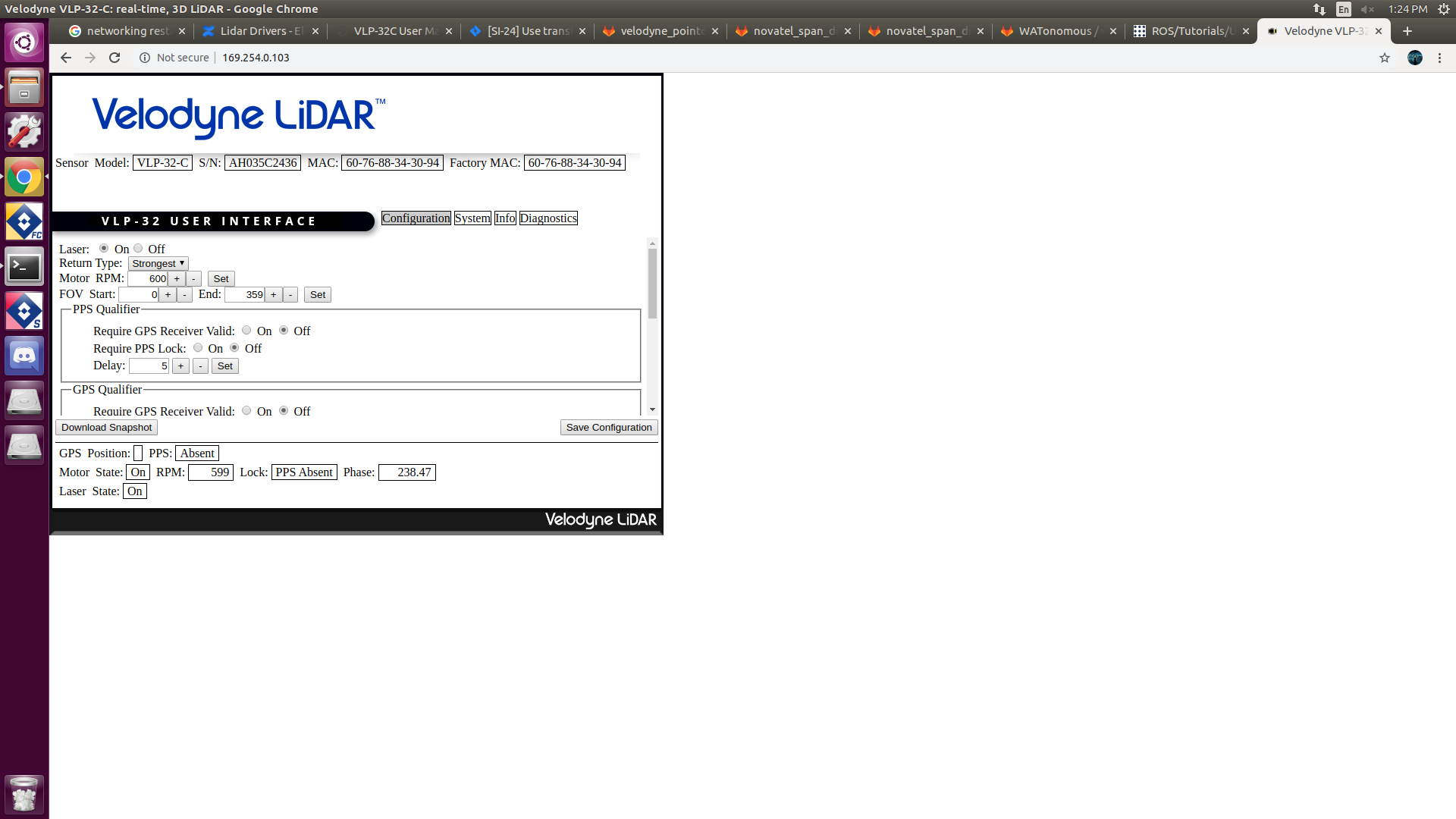
To access the LiDAR's web UI, type in the IP address of the LiDAR in a web browser. For more information about the LiDAR UI, look at this pdf: https://icave2.cse.buffalo.edu/resources/sensor-modeling/VLP32CManual.pdf.
[ {.confluence-embedded-image
height=”400”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
{.confluence-embedded-image
height=”400”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
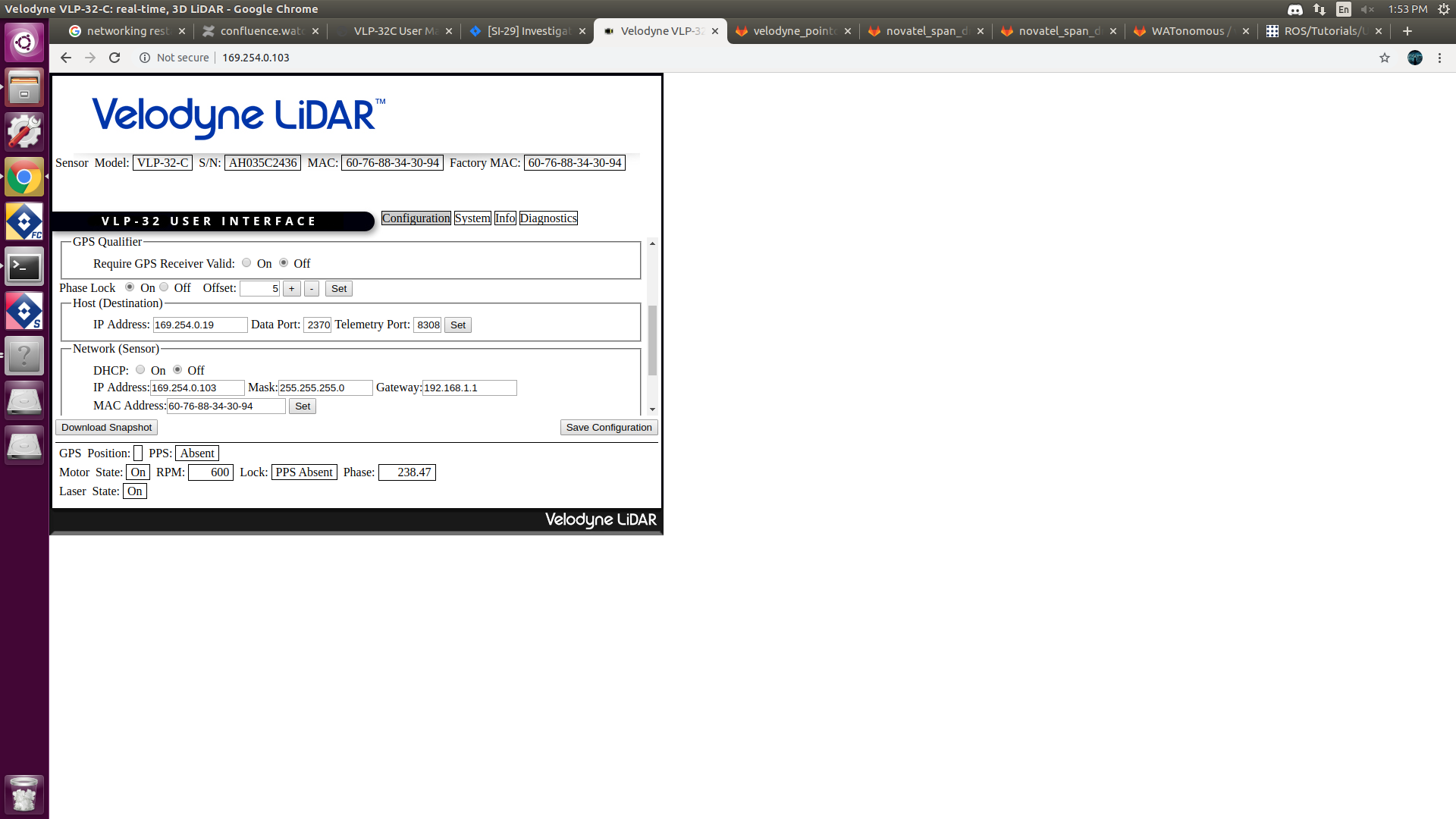
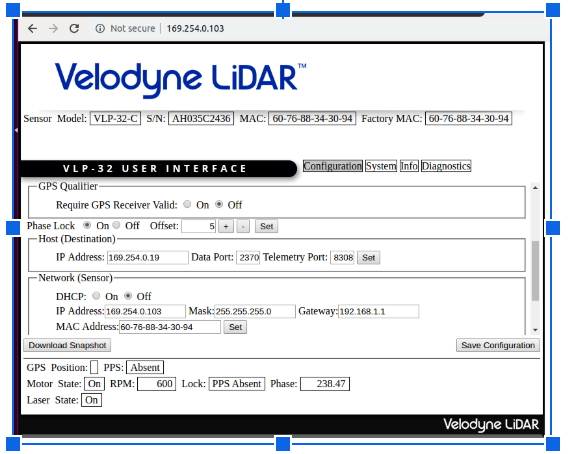
Important things to note are that DHCP is off. Don't turn this on. The LiDAR's IP address should be configured to whatever is in the table. The host IP is also configured, (169.254.0.19) so that the LiDAR knows who to transmit packets to. One consequence of this is that this configuration must match the Rugged's interface's IP configuration. The other possible configuration is 255.255.255.255, which is the broadcast address, which we should not do for multi-LiDAR networks because it causes a cross-loading.
The LiDAR drivers section discusses launching the LiDAR.
Attachments:
![]() VelodyneLidar.png (image/png)
VelodyneLidar.png (image/png)
![]() VelodyneIPconfig.png (image/png)
VelodyneIPconfig.png (image/png)
![]() VelodyneIPUI.png (image/png)
VelodyneIPUI.png (image/png)
![]() Screen Shot
2020-03-05 at 2.18.51 PM.png
(image/png)
Screen Shot
2020-03-05 at 2.18.51 PM.png
(image/png)
![]() LiDARwireshark.png (image/png)\
LiDARwireshark.png (image/png)\
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Document generated by Confluence on Nov 28, 2021 22:40