watonomous.github.io
[ Software Division : Behavioral State Machine ]
Created by [ Carter Pearson], last modified on Mar 10, 2020
[
https://drive.google.com/a/watonomous.ca/file/d/1-hcFxM_Hh7Rz_jctfwi9ySovg1WW6Hx2/view?usp=sharing
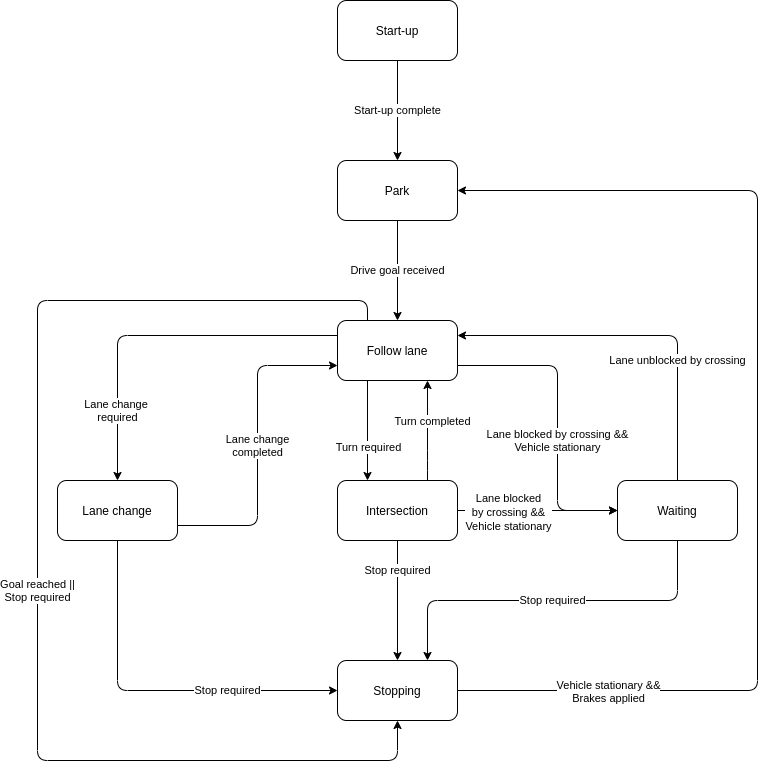
Descriptions of state actions:
-
Start-up
- Initial state of the vehicle
- After start-up procedure, transition into park (if there's no start-up procedure, will immediately transition to park)
-
Park
- Force apply full braking torque
- Shift gear to park
- [Override all torque and steer requests (do not allow MPC to control anything in this state)]{.inline-comment-marker data-ref=”5678719c-613c-4483-a5b5-ce982c93032a”}
-
Follow lane
- Trajectory being created is sent to MPC
- Update max velocity based on speed limit
- Draw stop lines based on environment
-
Lane change
- [Requests lane change trajectory be calculated]{.inline-comment-marker data-ref=”c1ee78fd-b92f-4c70-877c-318929731c35”}
- Keep max velocity constant
- MPC will follow lane change trajectory
-
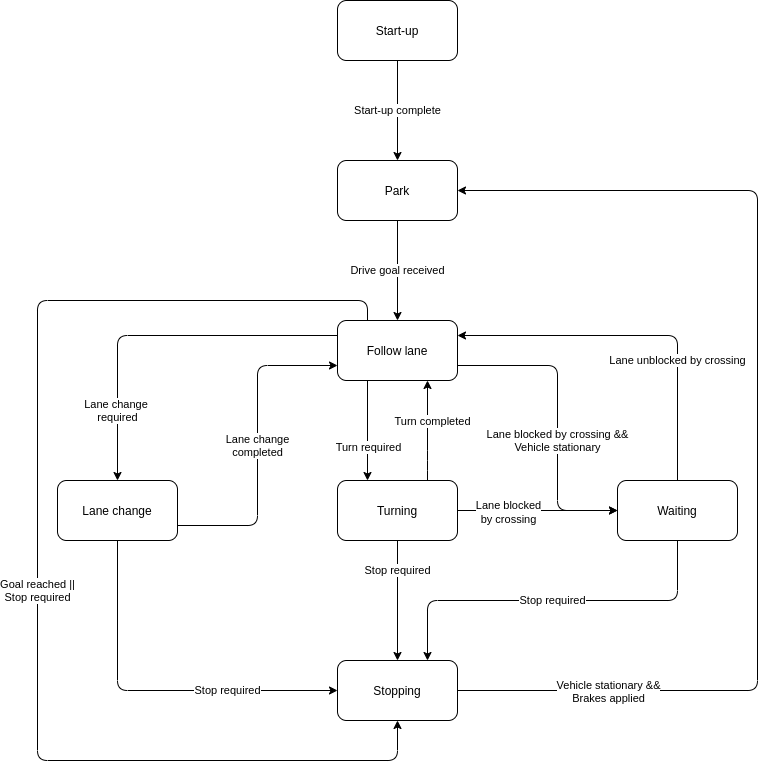
[Intersection]
- [Same behaviour as follow lane, but we restrict lane changing]{.inline-comment-marker data-ref=”b71c5aeb-60fe-4e02-988e-5f5cf7900625”}
- Enable correct turn signal
-
Waiting
- Keep in drive gear
- Force apply full braking torque
- Override all torque and steer requests from MPC
- [Monitor stop line's status]{.inline-comment-marker data-ref=”0f203b7b-f47d-43ee-8dad-bbe59a7300d2”}
- After stop line is cleared, have to wait for a timeout until state can be transitioned out of
-
Stopping
- [Force minimum amount of braking torque,]{.inline-comment-marker data-ref=”3da5745e-1ce1-4b1f-8211-f6ed13b890d3”} but still allow for MPC to provide control otherwise
Previous state machine: https://drive.google.com/a/watonomous.ca/file/d/1yqzuB7_qgV_pUgb-sGIl3cn5LlensRSI/view?usp=sharing
Attachments:
![]() BehaviouralStateMachine_v1.png
(image/png)
BehaviouralStateMachine_v1.png
(image/png)
![]() BehaviouralStateMachine_v1 (1).png
(image/png)\
BehaviouralStateMachine_v1 (1).png
(image/png)\
{kind=link}
Document generated by Confluence on Dec 10, 2021 04:01