watonomous.github.io
[ Software Division : 3D Object Detection ]
Created by [ Rowan Dempster], last modified by [ Anita Hu] on Jan 14, 2020
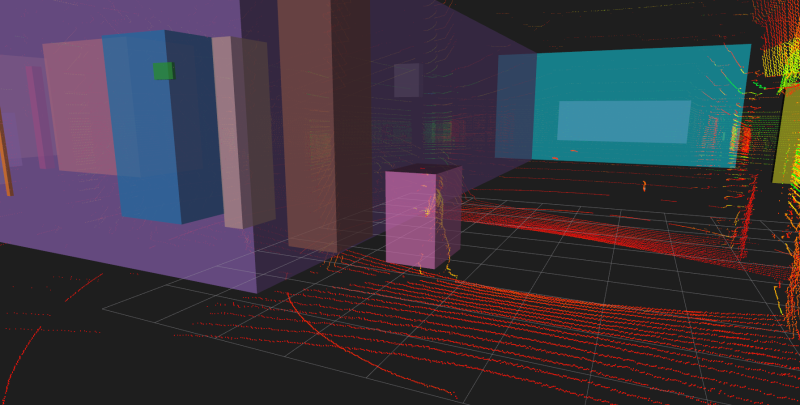
The main purpose of the 3D Object Detection is to identify solid objects in the environment that may pose hazards to the self-driving vehicle's planned path. Objects that will be focused on include (fake) animals, pedestrians, and cyclists. You will be working largely with C++, PCL, and the ROS Kinetic framework.
Resources to get started:
Code that you will probably be using (Autoware is an open source
self-driving repository):
https://github.com/CPFL/Autoware/tree/master/ros/src/computing/perception/detection/lidar_detector/packages/lidar_euclidean_cluster_detect/nodes/lidar_euclidean_cluster_detect
Clustering method from above code:
http://pointclouds.org/documentation/tutorials/cluster_extraction.php
Current code on Gitlab:
https://git.uwaterloo.ca/WATonomous/perception-year-2/tree/develop/object_detection
[ {.confluence-embedded-image
height=”250”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
{.confluence-embedded-image
height=”250”}]{.confluence-embedded-file-wrapper
.confluence-embedded-manual-size}
Attachments:
![]() unknown.png (image/png)\
unknown.png (image/png)\
Document generated by Confluence on Dec 10, 2021 04:01